The Competition
The 2025-26 FIRST Tech Challenge game is DECODE, where the major objective is to launch balls called ARTIFACTS into a scoring zone for points. Click image to learn more!
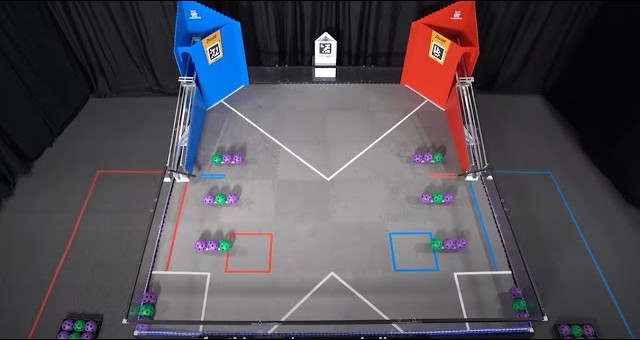
The 2025-26 FIRST Tech Challenge game is DECODE, where the major objective is to launch balls called ARTIFACTS into a scoring zone for points. Click image to learn more!
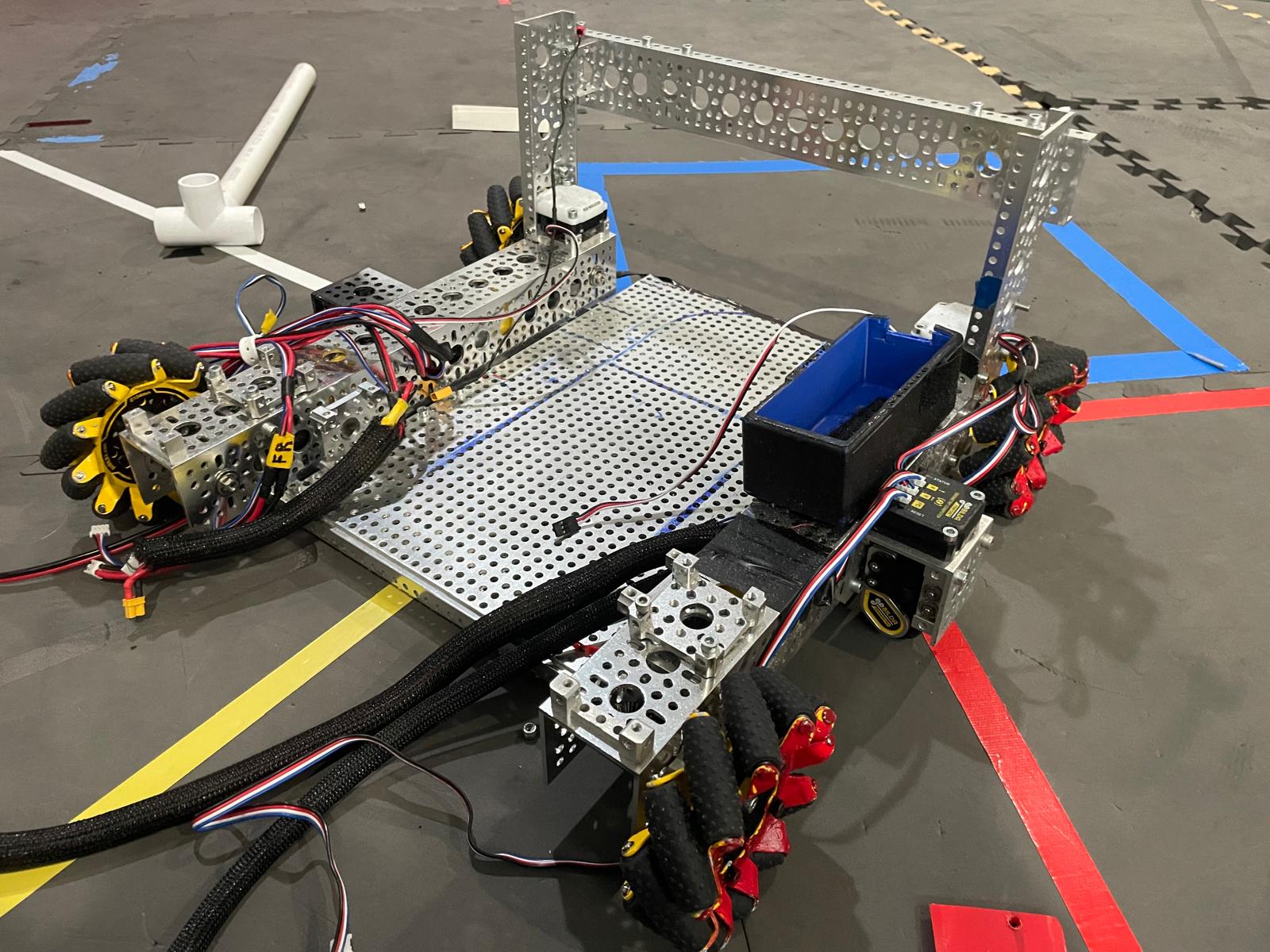
Our robot is named Caitlin 22.0, to honor WNBA player Caitlin Clark of Iowa. Our strategy this season focuses on rapid and consistent shooting from up close and far. We can score 12 balls in autonomous and up to 30 in driver control.

4-wheel mecanum drive equipped with two goBILDA odometry pods for localization
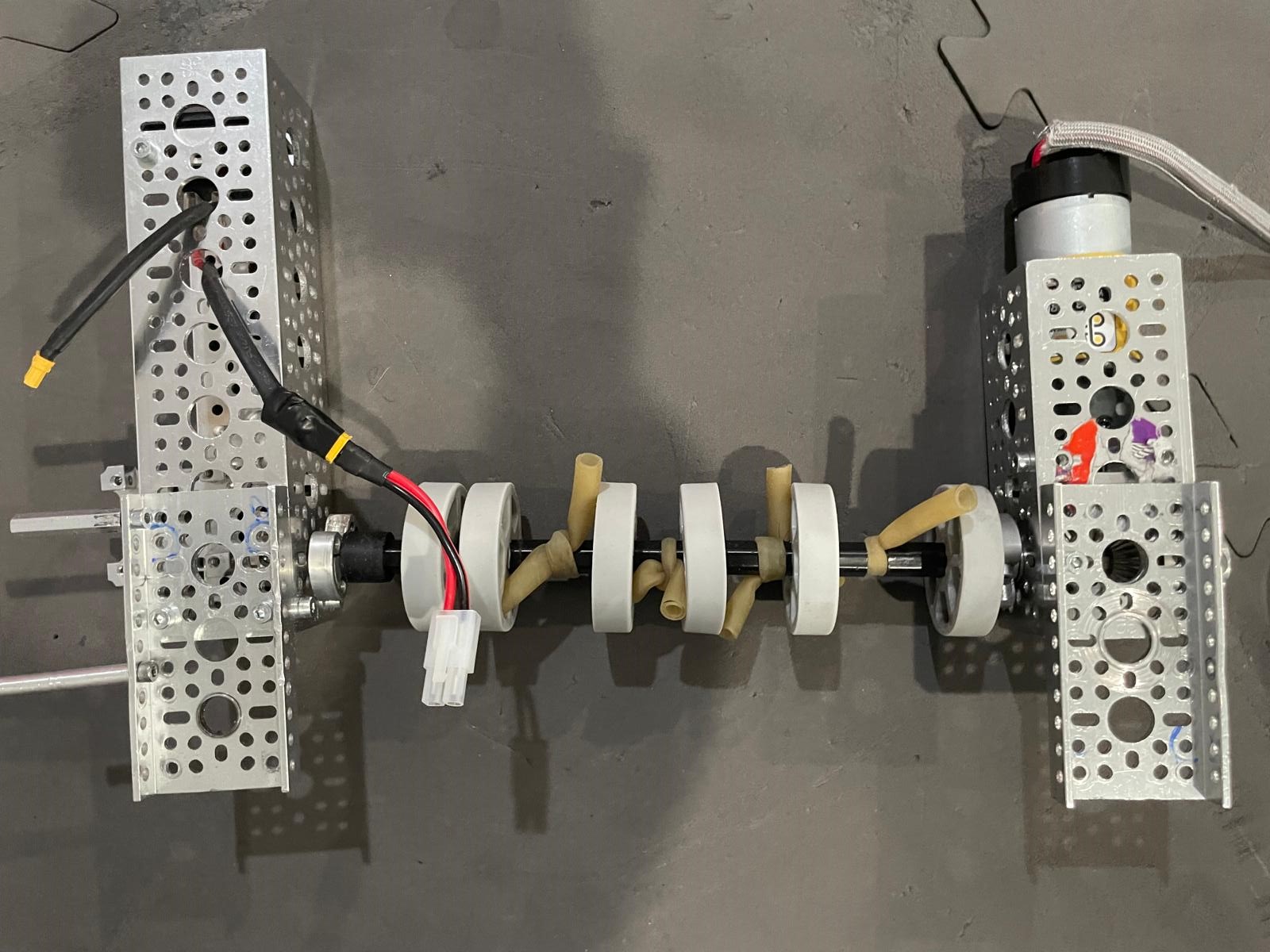
Compliant-wheel intake bar to quickly and effectively intake artifacts.
Chained-up sets of rollers to move balls from the intake to the shooter. Gate servo allows control over ball flow.
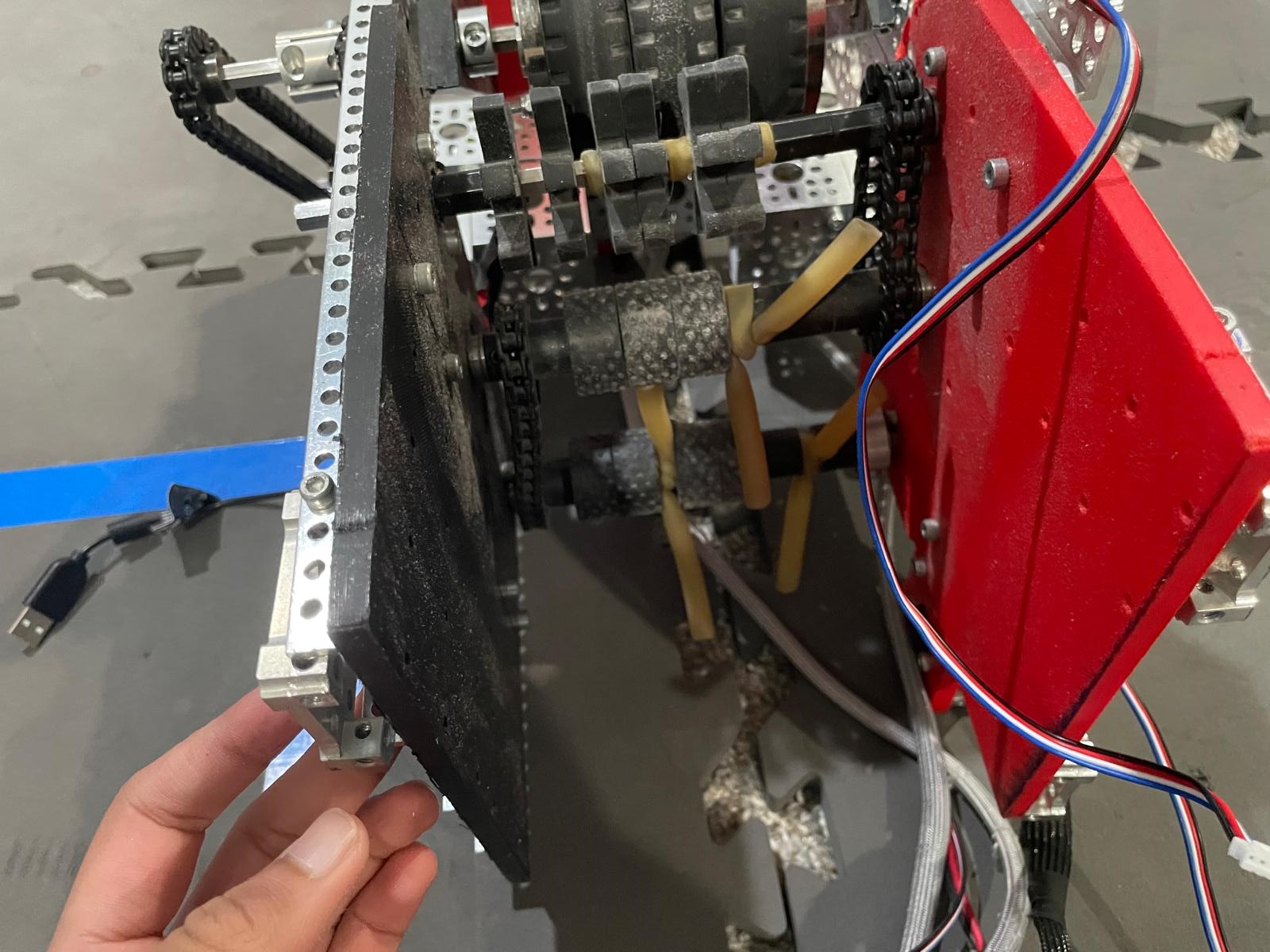
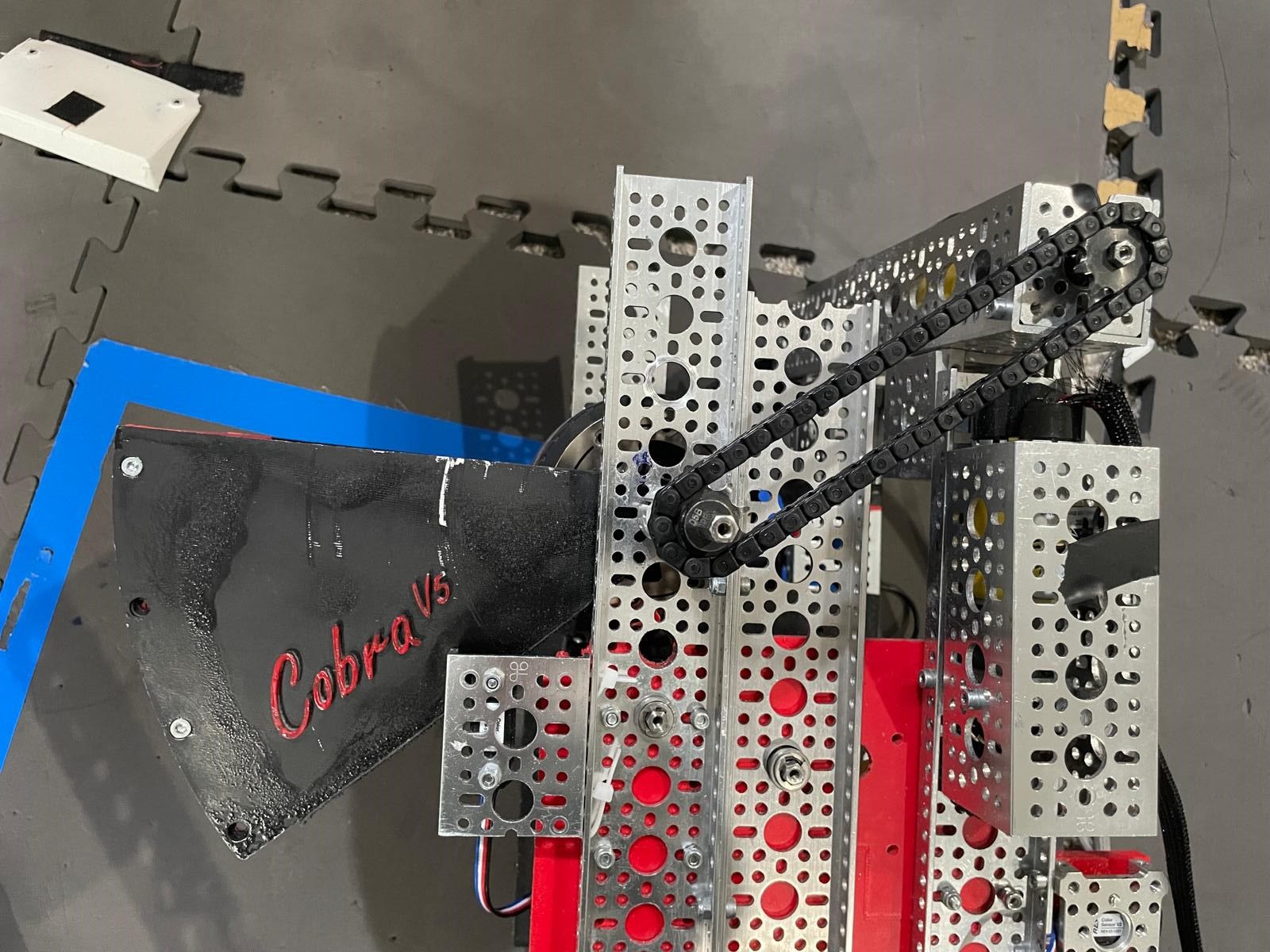
Optimized dual-motor flywheel shooter for consistent and accurate ball launching from anywhere on the field.
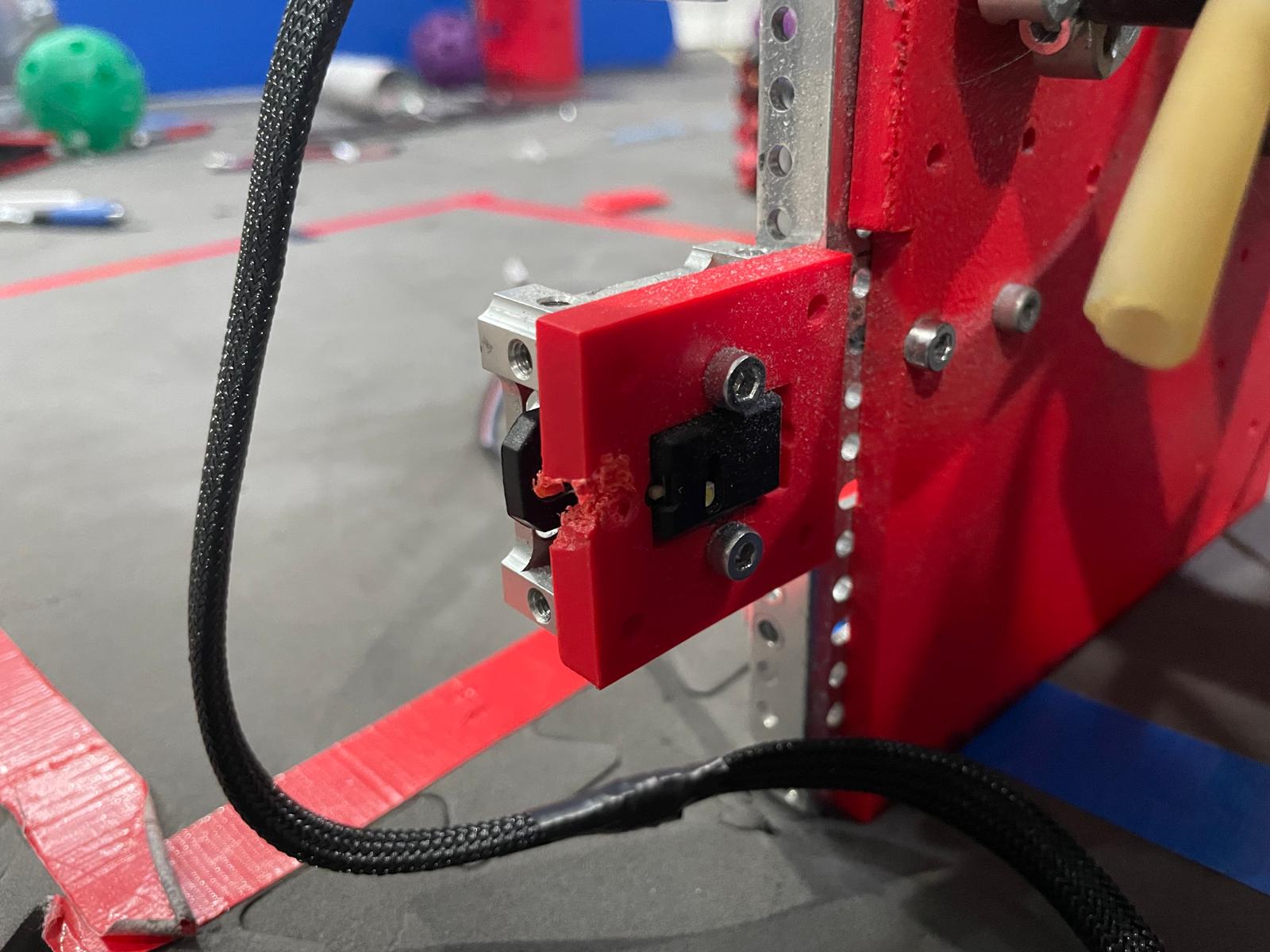
Use of color sensors to detect artifact color and position within system.
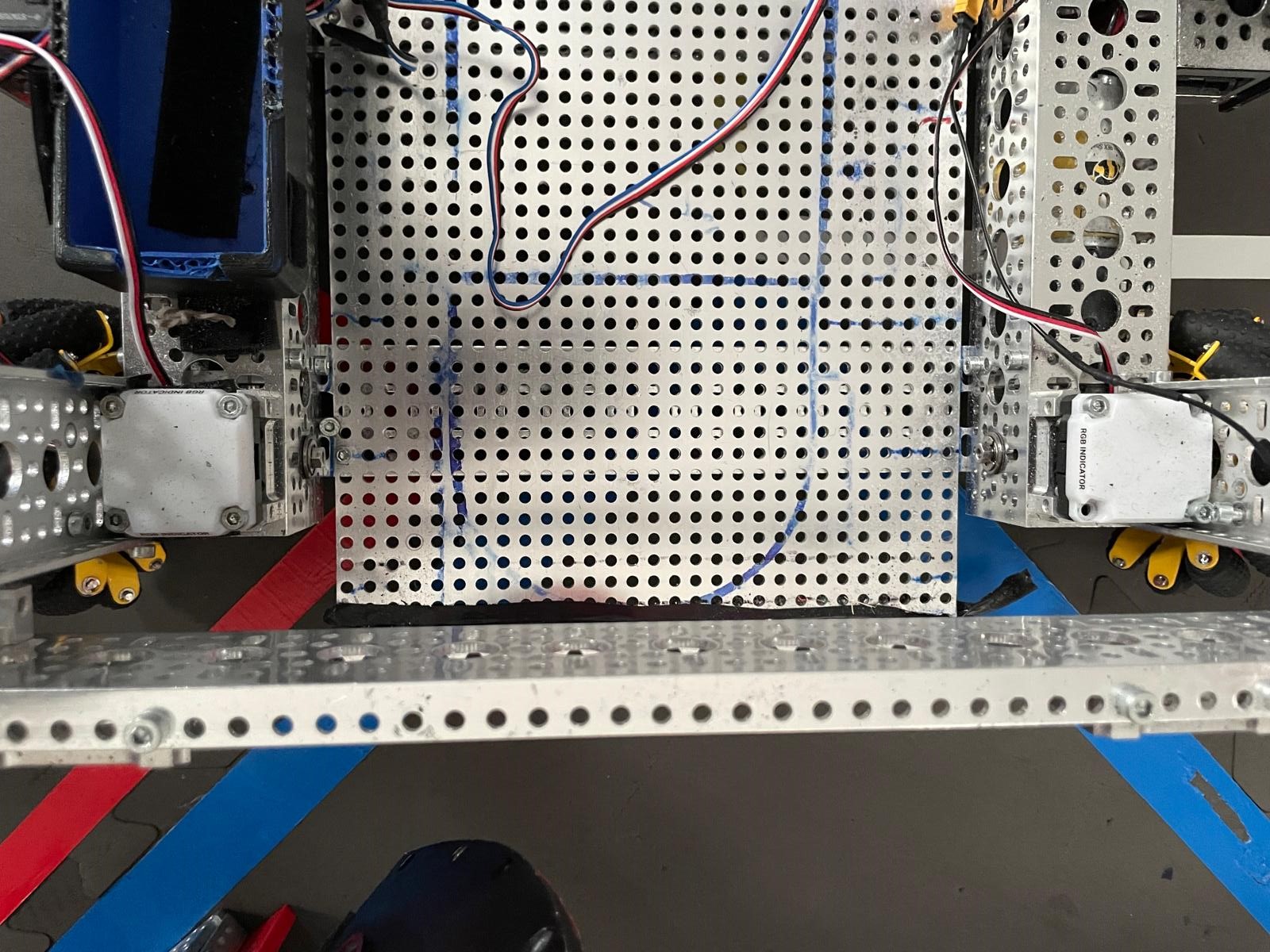
2 RGB lights for crucial visual feedback and status indication.
We went through 6 different robots for DECODE. Here's a look at each of them.
MAXIMA
Modified goBILDA starter bot
12th Hour

Robot in 12 hours challenge
RAMPager
Our take on the dual-wheeled shooter
The Boss

Debut of Cobra
Caitlin 22
Our league tournament robot
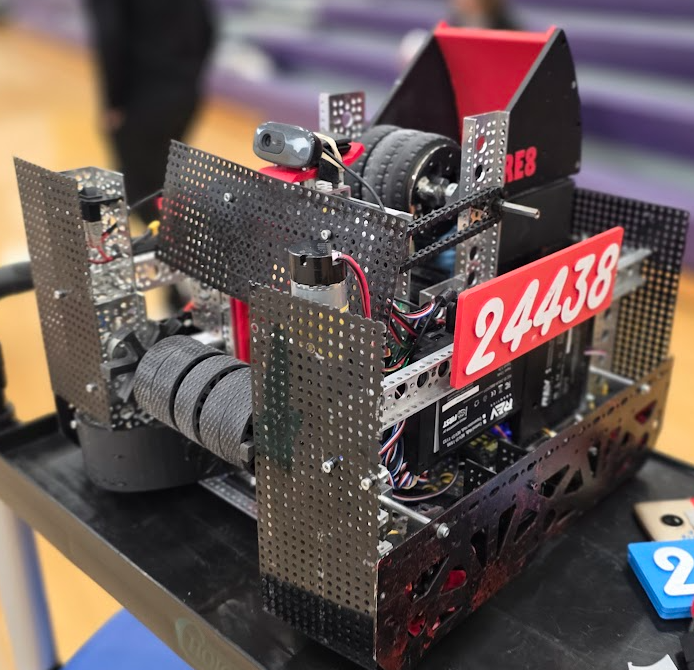
Caitlin 22.0
Our state robot
Our code is written in Java using the FTC SDK. All of our programs are written with Android Studio. Key features include:
With a mix of a well tuned PID velocity-controlled shooter and a camera with AprilTag detection, we can shoot from anywhere on the field.
Using goBILDA's odometry solution alongside PedroPathing, we can consistently score 12 balls in 30 seconds.
With two "eyes" on the robot, we provide visual feedback to the driver about the robot's status and performance.